
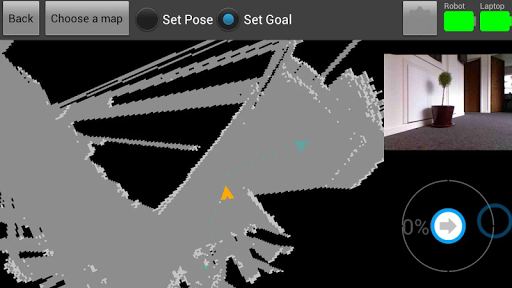
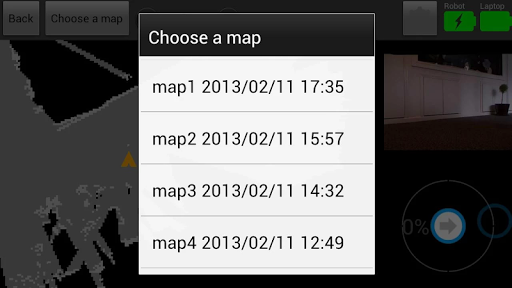
Use a map to navigate with your ROS-enabled robot.
There are 2 basic operations:
- Set Pose: allows you to change the estimated pose of the robot.
- Set Goal: allows you to send the robot somewhere in the map.
Wiki available here:
http://www.ros.org/wiki/android_map_nav
Source code:
https://github.com/rosjava/android_apps
Issue tracker:
https://github.com/rosjava/android_apps/issues
Updates for the Kinetic release.
![Autonomous Mapping in Unknown Environment | Robot Gmapping | Webots ROS Simulator | [Tutorial 3] screenshot 1](https://i.ytimg.com/vi/LQcMeIJlNhk/mqdefault.jpg)





9Apps 4.9



















